Contributing a New Module
We’ll go through the build a module for Nautobot’s new route-targets endpoint under the IPAM app.
Research API Spec to find necessary module arguments
We’ll need to look at the API spec for route-target to understand what arguments we need to support in our module.
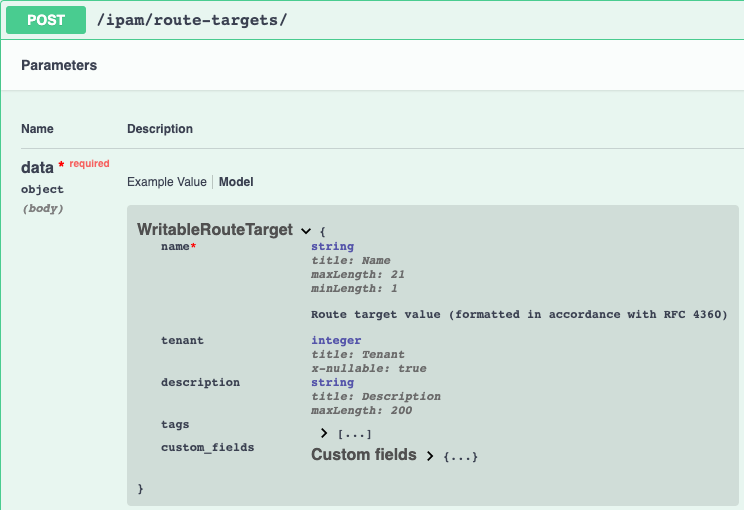
This module is light, but we can will cover most of the changes required for any module to function properly. We can see that the only required argument is going to be name. The next argument will be tenant that which is another object within Nautobot, but fortunately we have already implemented the necessary changes to find a tenant. Description is only text field so there won’t be any changes necessary for this argument. Tags is handled the same way as tenant and no additional code will be required for that. Custom fields is similar, but doesn’t require any necessary search for an object, but the custom field must exist on the endpoint.
name (Required)
tenant (Optional)
description (Optional)
tags (Optional)
custom_fields (Optional)
Update App Module Util
Open plugins/module_utils/ipam.py file and update the following.
...
NB_ROUTE_TARGETS = "route_targets"
...
class NautobotIpamModule(NautobotModule):
...
def run(self):
"""
...
- route_targets
...
"""
These should be all the changes we need within this file for the time being.
Update Nautobot Utils
Open plugins/module_utils/utils.py and update the following.
# Used to map endpoints to applications dynamically
API_APPS_ENDPOINTS = dict(
...
extras=["tags"],
ipam=[
...
"route_targets",
...
],
...
# Used to normalize data for the respective query types used to find endpoints
QUERY_TYPES = dict(
...
device="name",
rir="name",
route_targets="name",
...
ENDPOINT_NAME_MAPPING = {
...
"locations": "location",
"rirs": "rir",
"roles": "role",
"route_targets": "route_target",
...
ALLOWED_QUERY_PARAMS = {
...
"location": set(["name, "id"]),
"rear_port": set(["name", "device"]),
"rear_port_template": set(["name", "device_type"]),
"rir": set(["name"]),
"role": set(["name"]),
"route_target": set(["name"]),
...
It is almost the same as the QUERY_TYPE, but this is used to build the query params for an object and can be overridden.
Create the Module Python File
Copy an existing module file from plugins/modules and name it versa_route_target.py.
Now we need to update the DOCUMENTATION variable to match the module we’re creating.
Note
There are builtin options that you shouldn’t have to change such as url, token, state,
query_params, and validate_certs.
DOCUMENTATION = r"""
---
module: route_target
short_description: Creates or removes route targets from Nautobot
description:
- Creates or removes route targets from Nautobot
notes:
- Tags should be defined as a YAML list
- This should be ran with connection C(local) and hosts C(localhost)
author:
- Network to Code <opensource@networktocode.com>
requirements:
- pynautobot
version_added: "1.0.0"
options:
...
data:
type: dict
description:
- Defines the route target configuration
suboptions:
name:
description:
- Route target name
required: true
type: str
tenant:
description:
- The tenant that the route target will be assigned to
required: false
type: raw
description:
description:
- Tag description
required: false
type: str
tags:
description:
- Any tags that the device may need to be associated with
required: false
type: list
custom_fields:
description:
- must exist in Nautobot
required: false
type: dict
required: true
...
"""
- Update the following:
module
short_description
description
author
version_added (update to next minor number from what is on Ansible Galaxy)
options -> data (All the necessary information from what we found from the API docs)
Just a few things to note here are the types that are defined for the documentation. The should mostly follow the API such as a string, integer, list, etc. In the case of arguments that resolve to objects within Nautobot, typically raw is used so the user can specify either a string or a dictionary with other fields that will help search for the object within the API.
The next step is to update the EXAMPLES variable.
EXAMPLES = r"""
- name: "Test route target creation/deletion"
connection: local
hosts: localhost
gather_facts: False
tasks:
- name: Create Route Targets
networktocode.nautobot.route_target:
url: http://nautobot.local
token: thisIsMyToken
data:
name: "{{ item.name }}"
tenant: "Test Tenant"
tags:
- Schnozzberry
loop:
- { name: "65000:65001", description: "management" }
- { name: "65000:65002", description: "tunnel" }
- name: Update Description on Route Targets
networktocode.nautobot.route_target:
url: http://nautobot.local
token: thisIsMyToken
data:
name: "{{ item.name }}"
tenant: "Test Tenant"
description: "{{ item.description }}"
tags:
- Schnozzberry
loop:
- { name: "65000:65001", description: "management" }
- { name: "65000:65002", description: "tunnel" }
- name: Delete Route Targets
networktocode.nautobot.route_target:
url: http://nautobot.local
token: thisIsMyToken
data:
name: "{{ item }}"
state: absent
loop:
- "65000:65001"
- "65000:65002"
"""
The examples should encompass as many different use cases of the module as possible to aid the user with how they can use the module.
The only update to the RETURN variable should be the name of the object returned.
RETURN = r"""
route_targets:
description: Serialized object as created/existent/updated/deleted within Nautobot
returned: always
type: dict
msg:
description: Message indicating failure or info about what has been achieved
returned: always
type: str
"""
Now we import the necessary components from the collection that make up the meat of our module.
from ansible_collections.networktocode.nautobot.plugins.module_utils.utils import (
NautobotAnsibleModule,
NAUTOBOT_ARG_SPEC,
)
from ansible_collections.networktocode.nautobot.plugins.module_utils.ipam import (
NautobotIpamModule,
NB_ROUTE_TARGETS,
)
from copy import deepcopy
We import our custom NautobotAnsibleModule to properly validate our data and our base argument spec (NAUTOBOT_ARG_SPEC) that all modules should implement.
NAUTOBOT_ARG_SPEC = dict(
url=dict(type="str", required=True),
token=dict(type="str", required=True, no_log=True),
state=dict(required=False, default="present", choices=["present", "absent"]),
query_params=dict(required=False, type="list", elements="str"),
validate_certs=dict(type="raw", default=True),
)
Let’s move onto the main() function in the module and take a look at the required argument spec.
def main():
"""
Main entry point for module execution
"""
argument_spec = deepcopy(NAUTOBOT_ARG_SPEC)
argument_spec.update(
dict(
data=dict(
type="dict",
required=True,
options=dict(
name=dict(required=True, type="str"),
tenant=dict(required=False, type="raw"),
description=dict(required=False, type="str"),
tags=dict(required=False, type="list"),
custom_fields=dict(required=False, type="dict"),
),
),
)
)
We augment the argument spec by adding the module specific argument spec we need. You may notice that this matches the documentation due to the sanity tests that will run when a PR is submitted to the project and both the documentation and argument spec should match.
def main():
...
module = NautobotAnsibleModule(argument_spec=argument_spec, supports_check_mode=True)
route_target = NautobotIpamModule(module, NB_ROUTE_TARGETS)
route_target.run()
We then initialize our custom NautobotAnsibleModule that will be passed into our custom NautobotIpamModule and then execute the run method.
That is all that our module needs to implement at this point. We can test this locally by installing the collection locally and testing this within a playbook by following the directions here.
Here is the output of the a playbook I created using the examples we documented with the only changes being the url and token.
❯ ansible-playbook pb.test-rt.yml -vv
ansible-playbook 2.10.4
config file = /Users/myohman/cloned-repos/nautobot-ansible/ansible.cfg
configured module search path = ['/Users/myohman/.ansible/plugins/modules', '/usr/share/ansible/plugins/modules']
ansible python module location = /Users/myohman/.virtualenvs/main3.8/lib/python3.8/site-packages/ansible
executable location = /Users/myohman/.virtualenvs/main3.8/bin/ansible-playbook
python version = 3.8.6 (default, Nov 17 2020, 18:43:06) [Clang 12.0.0 (clang-1200.0.32.27)]
Using /Users/myohman/cloned-repos/nautobot-ansible/ansible.cfg as config file
[WARNING]: No inventory was parsed, only implicit localhost is available
[WARNING]: provided hosts list is empty, only localhost is available. Note that the implicit localhost does not match 'all'
Skipping callback 'default', as we already have a stdout callback.
Skipping callback 'minimal', as we already have a stdout callback.
Skipping callback 'oneline', as we already have a stdout callback.
PLAYBOOK: pb.test-rt.yml *********************************************************************************************************************************************************************************************************************************************************************************************
1 plays in pb.test-rt.yml
PLAY [Test route target creation/deletion] ***************************************************************************************************************************************************************************************************************************************************************************
META: ran handlers
TASK [Create Route Targets] ******************************************************************************************************************************************************************************************************************************************************************************************
task path: /Users/myohman/cloned-repos/nautobot-ansible/pb.test-rt.yml:7
changed: [localhost] => (item={'name': '65000:65001', 'description': 'management'}) => {"ansible_loop_var": "item", "changed": true, "item": {"description": "management", "name": "65000:65001"}, "msg": "route_target 65000:65001 updated", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "", "id": 1, "last_updated": "2021-01-13T23:06:40.211082Z", "name": "65000:65001", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/1/"}}
changed: [localhost] => (item={'name': '65000:65002', 'description': 'tunnel'}) => {"ansible_loop_var": "item", "changed": true, "item": {"description": "tunnel", "name": "65000:65002"}, "msg": "route_target 65000:65002 created", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "", "id": 2, "last_updated": "2021-01-13T23:59:29.946943Z", "name": "65000:65002", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/2/"}}
TASK [Update Description on Route Targets] ***************************************************************************************************************************************************************************************************************************************************************************
task path: /Users/myohman/cloned-repos/nautobot-ansible/pb.test-rt.yml:20
changed: [localhost] => (item={'name': '65000:65001', 'description': 'management'}) => {"ansible_loop_var": "item", "changed": true, "item": {"description": "management", "name": "65000:65001"}, "msg": "route_target 65000:65001 updated", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "management", "id": 1, "last_updated": "2021-01-13T23:59:29.146435Z", "name": "65000:65001", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/1/"}}
changed: [localhost] => (item={'name': '65000:65002', 'description': 'tunnel'}) => {"ansible_loop_var": "item", "changed": true, "item": {"description": "tunnel", "name": "65000:65002"}, "msg": "route_target 65000:65002 updated", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "tunnel", "id": 2, "last_updated": "2021-01-13T23:59:29.946943Z", "name": "65000:65002", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/2/"}}
TASK [Delete Route Targets] ******************************************************************************************************************************************************************************************************************************************************************************************
task path: /Users/myohman/cloned-repos/nautobot-ansible/pb.test-rt.yml:34
changed: [localhost] => (item=65000:65001) => {"ansible_loop_var": "item", "changed": true, "item": "65000:65001", "msg": "route_target 65000:65001 deleted", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "management", "id": 1, "last_updated": "2021-01-13T23:59:30.829004Z", "name": "65000:65001", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/1/"}}
changed: [localhost] => (item=65000:65002) => {"ansible_loop_var": "item", "changed": true, "item": "65000:65002", "msg": "route_target 65000:65002 deleted", "route_target": {"created": "2021-01-13", "custom_fields": {}, "description": "tunnel", "id": 2, "last_updated": "2021-01-13T23:59:31.748181Z", "name": "65000:65002", "tags": [4], "tenant": 1, "url": "http://192.168.50.10:8000/api/ipam/route-targets/2/"}}
META: ran handlers
META: ran handlers
PLAY RECAP ***********************************************************************************************************************************************************************************************************************************************************************************************************
localhost : ok=3 changed=3 unreachable=0 failed=0 skipped=0 rescued=0 ignored=0
Testing
Sanity Tests
Sanity tests are ran and involve multiple tests that Ansible deems necessary. We adhere to these to make sure we’re following Ansible’s guidelines.
There are a few tests we may need to skip depending on the module and these can be found within tests/sanity/ignore-2.10.txt. If your module fails sanity tests, you may add an exception to this file
if it is one of the skipped tests already documented in there for existing modules. If it is not, then please raise the error in the PR you open for your module contribution.
Integration Tests
Now we need to make sure we add integration tests to test our newly created module. Let’s take a high level look at how the integration tests work.
They’re stored in tests/integration/targets and each target corresponds with a command line argument you specify when running ansible-test integration to tell it which target to execute.
❯ tree tests/integration
tests/integration
├── integration.cfg
├── nautobot-deploy.py
├── render_config.sh
└── targets
├── latest
│ └── tasks
│ ├── main.yml
│ ├── cable.yml
├── regression-latest
│ └── tasks
│ └── main.yml
├── regression-v2.9
│ └── tasks
│ └── main.yml
└── v2.9
└── tasks
├── main.yml
├── cable.yml
This isn’t all the directories or files, but since we only support the two latest Nautobot releases, we have a folder for the latest and the second latest version of Nautobot, in this case v2.9.
We also have a regression targets for tests that cover found bugs. With the route_target module, since it’s a 2.10 feature, we only have to worry about adding integration tests to the
latest target folder.
Note
If functionality exists in both supported versions, you can complete the steps below and then just copy over the tasks file we create below.
The way ansible-test works for integration tests is similar to roles where it will execute tasks from the main.yml file. The way we use the main.yml file here is by specifying a task for each module
that uses the include_tasks functionality to then test each module.
Let’s start by adding to tests/integration/targets/latest/main.yml.
---
...
- name: "NAUTOBOT_ROUTE_TARGET_TESTS"
include_tasks: "route_target.yml"
Next we’ll create a new file named tests/integration/targets/latest/route_target.yml that will include our integration tests. Below is the pattern we’ll follow.
Add (check mode)
Add
Add (idempotent check)
Update (check mode)
Update
Update (idempotent check)
Delete (check mode)
Delete
Delete (idempotent)
I won’t be posting the actual implementation of this as it is a few hundred lines long, but you can view it by browsing to the specific file. To run the integration tests, it is best to push your changes up and let CI/CD pipeline to run, but we will be updating the development to allow local testing.
After all tests pass, let’s generate our new documents. From the root of the collection, run the following commands.
❯ poetry shell && poetry install
❯ ./hacking/make-docs.sh
rm: tests/output: No such file or directory
rm: .pytest_cache: No such file or directory
Using /Users/myohman/cloned-repos/nautobot-ansible/ansible.cfg as config file
Created collection for networktocode.nautobot at /Users/myohman/cloned-repos/nautobot-ansible/networktocode.nautobot-1.1.0.tar.gz
Starting galaxy collection install process
[WARNING]: The specified collections path '/Users/myohman/cloned-repos/nautobot-ansible' is not part of the configured Ansible collections paths
'/Users/myohman/.ansible/collections:/usr/share/ansible/collections'. The installed collection won't be picked up in an Ansible run.
Process install dependency map
Starting collection install process
Installing 'networktocode.nautobot:1.1.0' to '/Users/myohman/cloned-repos/nautobot-ansible/ansible_collections/networktocode.nautobot'
networktocode.nautobot (1.1.0) was installed successfully
Installing 'ansible.netcommon:1.4.1' to '/Users/myohman/cloned-repos/nautobot-ansible/ansible_collections/ansible/netcommon'
Downloading https://galaxy.ansible.com/download/ansible-netcommon-1.4.1.tar.gz to /Users/myohman/.ansible/tmp/ansible-local-4390k59zwzli/tmp5871aum5
ansible.netcommon (1.4.1) was installed successfully
Installing 'community.general:1.3.4' to '/Users/myohman/cloned-repos/nautobot-ansible/ansible_collections/community/general'
Downloading https://galaxy.ansible.com/download/community-general-1.3.4.tar.gz to /Users/myohman/.ansible/tmp/ansible-local-4390k59zwzli/tmp5871aum5
community.general (1.3.4) was installed successfully
Installing 'google.cloud:1.0.1' to '/Users/myohman/cloned-repos/nautobot-ansible/ansible_collections/google/cloud'
Downloading https://galaxy.ansible.com/download/google-cloud-1.0.1.tar.gz to /Users/myohman/.ansible/tmp/ansible-local-4390k59zwzli/tmp5871aum5
google.cloud (1.0.1) was installed successfully
Installing 'community.kubernetes:1.1.1' to '/Users/myohman/cloned-repos/nautobot-ansible/ansible_collections/community/kubernetes'
Downloading https://galaxy.ansible.com/download/community-kubernetes-1.1.1.tar.gz to /Users/myohman/.ansible/tmp/ansible-local-4390k59zwzli/tmp5871aum5
community.kubernetes (1.1.1) was installed successfully
ERROR:antsibull:error=Cannot find plugin:func=get_ansible_plugin_info:mod=antsibull.docs_parsing.ansible_internal:plugin_name=networktocode.nautobot.interface:plugin_type=module|Error while extracting documentation. Will not document this plugin.
Let’s move onto updating vrf module. This new model within Nautobot is also tied to VRFs as import_targets and export_targets. Here is a screenshot of the new options we will need to add to the vrf module.
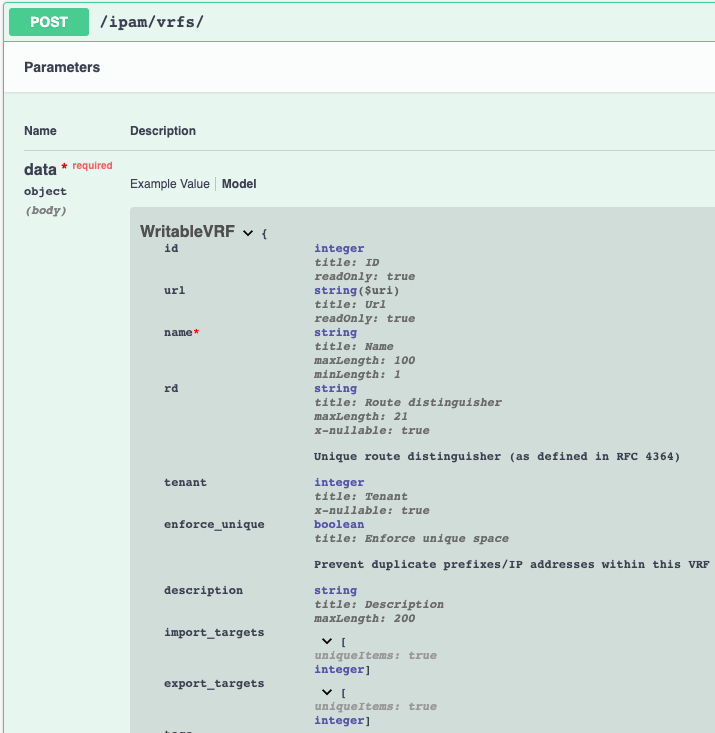
Let’s move onto Updating an Existing Module.